fsk คือ: คุณกำลังดูกระทู้
Table of Contents
Frequency-Modulated Continuous-Wave Radar (FMCW Radar)
FMCW radar
(Frequency-Modulated Continuous Wave radar = FMCW radar)
is a special type of radar sensor which radiates continuous transmission power like a simple continuous wave radar
(CW-Radar).
In contrast to this CW radar FMCW radar can change its operating frequency during the measurement:
that is, the transmission signal is modulated in frequency (or in phase).
Possibilities of Radar measurements through runtime measurements are only technically possible with these changes in the frequency (or phase).
Simple continuous wave radar devices without frequency modulation have the disadvantage
that it cannot determine target range because it lacks the timing mark necessary
to allow the system to time accurately the transmit and receive cycle and to convert this into range.
Such a time reference for measuring the distance of stationary objects,
but can be generated using of frequency modulation of the transmitted signal.
In this method, a signal is transmitted, which increases or decreases in the frequency periodically.
When an echo signal is received, that change of frequency gets a delay
Δt (by runtime shift) like to as the pulse radar technique.
In pulse radar, however, the runtime must be measured directly.
In FMCW radar are measured the differences in phase or frequency between the actually transmitted and the received signal instead.
The basic features of FMCW radar are:
- Ability to measure very small ranges to the target (the
minimal measured range
is comparable to the transmitted wavelength); - Ability to measure simultaneously the target range and its relative velocity;
- Very high accuracy of range measurement;
- Signal processing after mixing is performed at a low frequency range, considerably simplifying the realization of the processing circuits;
- Safety from the absence of the pulse radiation with a high peak power.
Principle of measurement
Characteristics of FMCW radar are:
- The distance measurement is accomplished by comparing the frequency of the received signal to a reference (usually directly the transmission signal).
- The duration of the transmitted waveform
T
is substantially greater than the required receiving time for the installed distance measuring range.
The distance R to the reflecting object can be determined by the following relations:
(1)
-
c0
= speed of light = 3·108 m/s
-
Δt
= delay time [s]
-
Δf
= measured frequency difference [Hz]
-
R
= distance between antenna and the reflecting object (ground) [m]
-
df/dt
= frequency shift per unit of time
If the change in frequency is linear over a wide range, then the radar range can be determined by a simple frequency comparison.
The frequency difference Δf is proportional to the distance R.
Since only the absolute amount of the difference frequency can be measured (negative numbers for frequency doesn’t exist),
the results are at a linearly increasing frequency equal to a frequency decreasing (in a static scenario: without Doppler effects).
If the reflecting object has a
radial speed
with respect to the receiving antenna,
then the echo signal gets a Doppler frequency fD (caused by the speed).
The radar measures not only the difference frequency Δf to the
current frequency (caused by the runtime),
but additional a Doppler frequency fD (caused by the speed).
The radar then measures depending on the movement direction and the direction of the linear modulation
only the sum or the difference between the difference frequency as the carrier of the distance information,
and of the Doppler frequency as a carrier of the velocity information.
If the measurement is made during a falling edge of a saw tooth (see right part of Figure 3),
then the Doppler frequency fD is subtracted of by the runtime frequency change.
If the reflecting object is moving away from the radar, then the frequency of the echo signal is reduced by the Doppler frequency additionally.
Now, if the measurement is performed with a sawtooth as shown in Figure 1,
then the received echo signal (the green graph) is moved not only by the run time to the right but also by the Doppler frequency down.
The measured difference frequency Δf is by the Doppler frequency fD
higher than according to the real run time should be.
Maximum Range and Range Resolution
By suitable choice of the frequency deviation per unit of time can be determined the radar resolution,
and by choice of the duration of the increasing of the frequency (the longer edge of the red sawtooth in Figure 1), can be determined the maximum non-ambiguous range.
The maximum frequency shift and steepness of the edge can be varied depending on the capabilities of the technology implemented circuit.
The maximum unambiguous range is determined by the necessary temporal overlap of the (delayed) received signal with the transmitted signal.
This is usually much larger than the energetic range, i.e. the limitations by the
free space loss.
For the
range resolution
of an FMCW radar, the bandwidth BW of the transmitted signal is decisive (as in so-called
chirp radar).
However, the technical possibilities of
Fast Fourier Transformation
are limited in time (i.e. by the duration of the sawtooth Τ ).
The resolution of the FMCW radar is determined by the frequency change that occurs within this time limit.
(2)
-
ΔfFFT
= smallest measurable frequency difference
-
d(f)/d(t)
= Steepness of the frequency deviation
-
fup
= upper frequency (end of the sawtooth)
-
fdwn
= lower frequency (start of the sawtooth)
The reciprocal of the duration of the sawtooth pulse leads to the smallest possible detectable frequency.
This can be expressed in the equation (1) as |Δf | and results in a range resolution capability of the FMCW radar.
For example, a given radar with a linear frequency shift with a duration of 1 ms,
can provide a maximum unambiguous range of less than 150 km theoretically.
This value results from the remaining necessarily overlap of the transmission signal with the echo signal
(see Figure 1)
to get enough time for measuring a difference frequency.
Most this range can never be achieved due to low power of the transmitter.
Thus always remains enough time for a measurement of the difference frequency.
If the maximum possible frequency shift for the transmitter’s modulation is 250 MHz,
then depending on this edge steepness a delay time of 4 ns obtains 1 kHz frequency difference.
This corresponds to a range resolution of 0.6 m.
This example shows impressively the advantage of the FMCW radar:
A pulse radar must measure these 4 ns delay difference, resulting in a considerable technical complexity.
A difference in frequency of 1 kHz, however, is much easier to measure because it is in audio range.
As with any radar in the FMCW radar, besides the allocated bandwidth,
the antenna beamwidth determines the angular resolution in detecting objects.
Modulation pattern
sawtooth
triangular
rectangular
staircase voltage
Figure 2: Common modulation pattern for an FMCW radar
sawtooth
triangular
rectangular
staircase voltage
Figure 2: Common modulation pattern for an FMCW radar
There are several possible modulation patterns which can be used for different measurement purposes:
- Sawtooth modulation
This modulation pattern is used in a relatively large range (maximum distance)
combined with a negligible influence of Doppler frequency (for example, a maritime navigation radar). - Triangular modulation
This modulation allows easy separation of the difference frequencyΔf
of the Doppler frequency
fD
- Square-wave modulation (simple frequency-shift keying,
FSK)
This modulation is used for a very precise distance measurement at
close range by phase comparison of the two echo signal frequencies.
It has the disadvantage, that the echo signals from several targets cannot be separated from each other,
and that this process enables only a small unambiguous measuring range. - Stepped modulation (staircase voltage)
This is used for interferometric measurements and expands the unambiguous measuring range. - Sinusoidal modulation
Sinusoidal modulation forms have been used in the past.
These could be easily realized by a motor turning a capacitor plate in the resonance chamber of the transmitter oscillator.
The radar then used only the relatively linear part of the sine function near the zero crossing.
Sawtooth linear frequency changing
In a linear sawtooth frequency changing (see Figure 1) a delay will shift the echo signal in time
(i.e. to the right in the picture).
This results in a frequency difference between the actual frequency and the delayed echo signal,
which is a measure of the distance of the reflecting object.
This frequency difference is called “beat frequency”.
An occurring Doppler frequency would now move the frequency of the entire echo signal either up
(moving towards the radar) or down (moving away from the radar).
In this form of modulation, the receiver has no way to separate the two frequencies.
Thus, the Doppler frequency will occur only as a measurement error in the distance calculation.
In the choice of an optimum frequency sweep can be considered a priori,
that the expected Doppler frequencies are as small as the resolution or at least,
that the measurement error is as small as possible.
transmitted signal
received
echo signal
Figure 3: Relationships with triangular modulation pattern
transmitted signal
received
echo signal
Figure 3: Relationships with triangular modulation pattern
This will be the case for example in maritime navigation radar:
Boats move in the coastal area at a limited speed, with respect to each other perhaps with a maximum of 10 meters per second.
In this frequency band of these radar sets
(X-Band
mostly), the expected maximum Doppler frequency is 666 Hz
If the radar signal processing uses a resolution in the kilohertz range per meter, this Doppler frequency is negligible.
Because the at an airfield occurring take-off and landing speeds of up to 200 m/s,
a maritime navigation FMCW radar would have trouble at all to see these planes.
The measurement error caused by the Doppler frequency can be greater than the distance to be measured.
The target signs would then theoretically appear in a negative distance, i.e. before the start of the deflection on the screen.
Triangular frequency changing
transmitted signal
received
echo signal
Figure 3: Relationships with triangular modulation pattern
In a triangular-shaped frequency changing, a distance measurement can be performed on both the rising and on the falling edge.
In Figure 3, an echo signal is shifted due to the running time compared to the transmission signal to the right.
Without a Doppler frequency, the amount of the frequency difference during the rising edge is equal to the measurement during the falling edge.
A Doppler frequency shifts the echo signal in height (green graph in the figure 3).
It appears the sum of the frequency difference Δf and the Doppler frequency fD
at the rising edge, and the difference between these two frequencies at the falling edge.
This opens up the possibility of making an accurate distance determination,
despite the frequency shift caused by the Doppler frequency,
which then consists of the arithmetic average of the two parts of measurements at different edges of the triangular pattern.
At the same time the accurate Doppler frequency can be determined from two measurements.
The difference between the two difference frequencies is twice the Doppler frequency.
Since the two differential frequencies, however, are not simultaneously available,
this comparison requires digital signal processing, with intermediate storage of the measured results.
The Doppler frequency-adjusted frequency for the distance determination and the Doppler frequency of a moving target is calculated by:
(3),(4)
-
f (R)
= frequency as a measure of distance determination
-
fD
= Doppler frequency as a measure of the speed measurement
-
Δf1
= frequency difference at the rising edge
-
Δf2
= frequency difference at the falling edge
ghost targets
Figure 4: Ghost targets, graphical solution
ghost targets
Figure 4: Ghost targets, graphical solution
The frequency f (R) can then be used in the formula (1) to calculate the exact distance.
However, this method has the disadvantage that, if appear a plurality of reflective objects,
the measured Doppler frequencies cannot be uniquely associated with a target.
The assignment of the wrong Doppler frequency to a destination in the wrong distance can lead to ghost targets.
In figure 4 a graphical solution is shown.
The position of a first target results from the functions
[-Δf1]1 + fD and
[+Δf2]1 – fD.
The intersection of the two lines is the position of the target 1.
When a second object ([……]2) with a second Doppler frequency appears
Just then both pairs of linear slopes give a total of four intersections, two of which are the ghost targets.
The position of ghost targets also depends on the steepness of the modulation pattern.
Therefore, the problem can be resolved by measuring cycles with different slope steepness’s:
then there to be shown only those targets, of which the coordinates are measured in both cycles in the same position.
1st frequency
2nd frequency
Figure 5: The phase difference Δn(φ) is a measure of
how much wavelengths are equal to twice the distance (round trip)
1st frequency
2nd frequency
Figure 5: The phase difference Δn(φ) is a measure of
how much wavelengths are equal to twice the distance (round trip)
Frequency Shift Keying (FSK)
The transceiver is simply switched back and forth with a rectangular control voltage between two transmission frequencies.
There are two principal ways to process the output signals of the transceiver.
The first possibility is to measure the duration of the frequency change.
A signal appears at the output of the transceiver whose envelope is a pulse having a given pulse width as a measure for the distance.
However, this measurement is a pure waste of time like the measurement of pulse radar and is therefore either inaccurate or technologically very complex.
A second possibility is to compare the phase angle of the echo signals of the two frequencies.
During the pulse top of the rectangular pulse, the radar operates at the first frequency,
and during the interpulse period the radar operates at the second frequency.
During these times in the millisecond range, the radar will work as for CW radar method.
The output of the down mixer (see block diagram), a DC voltage appears as a measure
of the phase difference between the reception signal and its transmission signal.
The phase difference between the echo signals of different transmission frequencies
(technically: the voltage difference at the output of the mixer) is a measure of the distance.
Again, both echo signals are not measured simultaneously, the voltage values must be stored digitally.
However, because of the periodicity of the sine wave,
this method has only a very limited unambiguous measurement distance
that is even this range; there the phase difference between the both echo signals is smaller than the half-wavelength.
A frequency difference of 20 MHz between two transmission frequencies results in an unambiguous measuring range of 15 meters.
Multiple targets at close range cannot be separated, since only one phase angle can be measured at the output of the mixer stage.
Several targets overlap to only a single output voltage at which dominates the strongest target.
If both analysis methods (in time and in phase) are applied simultaneously, then the time-dependent distance determination can used to as a rough evaluation.
The detailed results of the phase analysis can then be multiplied until the result is close enough to the distance from the measurement of time.
The bad unambiguous maximum range of the measurement of phase difference is thus avoided.
Stepped frequency changing
In general, the same advantages and disadvantages of a stepped frequency modulation
as the method with a square-wave modulation apply.
However, the FMCW radar is now working with several successive frequencies.
In each of these individual frequencies, a phase angle of the echo signal is measured.
The unambiguous measurement range widens considerably, however,
since now the phase relationships between several frequencies must be repeated to create ambiguities.
This method will be very interesting if resonances for individual component frequencies
can be observed at the irregularities of the reflecting object.
This measurement method is then a field of interferometry.
Block Diagram of an FMCW radar sensor
Transceiver
Part of a microprocessor board
Figure 6: Block Diagram of an FMCW radar sensor
Transceiver
Part of a microprocessor board
Figure 6: Block Diagram of an FMCW radar sensor
(interactive picture)
Figure 7: The FMCW-Radar ART Midrange uses separate antennas for transmitting and receiving
Figure 7: The FMCW-Radar
ART Midrange
uses separate
offset antennas
for transmitting and receiving
An FMCW radar consists essentially of the transceiver and a control unit with a microprocessor.
The transceiver is a compact module, and usually includes the patch antenna implemented as separate transmit and receive antenna.
The high frequency is generated by a voltage controlled oscillator which directly feeds the transmitting antenna, or its power is additionally amplified.
A part of the high frequency is coupled out and fed to a mixer which down converts the received and amplified echo signal in the baseband.
The control board contains a microprocessor that controls the transceiver,
converts the echo signals in a digital format as well (usually via USB cable) ensures the connection to a personal computer or laptop.
Using a digital to analog converter, the control voltage is provided to the frequency control.
The output voltage of the mixer is digitized.
If using a single antenna, then due to the method (simultaneously transmitting and receiving) the FMCW radar needs a
ferrite circulator
to separate the transmitting and receiving signals.
In the currently used patch antennas, however, the use of separate transmitting and receiving antennas is much cheaper.
On a common substrate are placed directly above each other, a transmitting antenna array and a receiving antenna array.
The polarization direction is rotated by 180° against each other often.
Often is reduced by an additional shielding plate a direct “crosstalk”
(ie a direct positive feedback between the two antennas).
Since the measurement is performed as a frequency difference between the transmitting and receiving signal,
the signal which is produced by this direct coupling can be suppressed due to the very small frequency difference.
In pure CW radar applications only the
Doppler frequency
must be processed.
This includes frequencies only up to 16.5 kHz by using an FMCW transceiver operating in
K-Band
(about 24 GHz) and the expected speeds for recording are up to 360 kilometers per hour.
Therefore as microprocessor there can be used a simple stereo audio processor,
which is produced in large quantities and is used for example in sound cards for home computers.
Even in the FSK method (rectangular pattern modulation) such a processor can be used conditionally.
In contrast, the receiver in a FMCW radar application must be able to process the whole transmitter’s frequency shift.
Thus frequencies up to 250 MHz are expected in the received signal.
This has a significant impact on the bandwidth of the subsequent amplifier and the necessary sampling frequency of the analog-to-digital converter.
Thus, the signal processing board of FMCW radar is considerably more expensive with respect to the CW radar.
There are currently on the market many inexpensive FMCW radar sensors or FMCW radar modules,
which contain a complete transceiver with integrated patch antenna array as so-called “front-end” of FMCW radar device.
These modules include as the core usually the
MMIC
module TRX_024_xx
(see data sheet) from
Silicon Radar
with a power output of up to 6 dBm.
This chip operates in the
K-Band
(24.0 … 24.25 GHz) and can be used as a sensor for speed and distance measurements.
The modulation or a frequency change is dependent on a control voltage and is connected to an external circuit,
which is either a fixed voltage (then operates the module as a CW radar),
or it is controlled by a processor and based on the output voltage of a digital-analog converter.
The output signal of the mixer is usually provided as I and Q signals,
and needs to be substantially amplified before the analog-to-digital conversion.
Imaging FMCW radar
Figure 8: The patch antenna array of a maritime FMCW navigation radar in X-band
Figure 8: The patch antenna array of a maritime FMCW navigation radar in
X-Band
This radar method is used in the so-called Broadband Radar™ as navigational radar for maritime applications.
Here, the frequency sweep is stopped, however, after reaching the maximum measurement range.
Therefore, the transmission signal looks more like a signal of pulse radar using intrapulse modulation.
This break has no direct influence on the maximum measuring distance here.
However, it is necessary to read the measured data from a buffer, and to transmit them lossless through narrowband line to the display unit.
Due to its operation – the frequency comparison of the received echo signal with the transmitted signal,
which is available across the entire distance – it remains an FMCW radar,
it will only intermittently switched off for a few milliseconds, as more data are simply not needed.
An imaging radar must perform a distance measurement for each point on the monitor.
A range resolution that is more dependent here on the size of a pixel of this screen and
from the ability of the signal processing to provide the data in the required speed.
It is required a high-resolution screen with the pixel resolution,
that as a minimum for each range difference two pixels must be available,
so even if the measured signal is exactly between the position of two pixels, both pixels ‘light up’
and upon movement of the target, the number of pixels used,
and thus the relative brightness of the target character is the same.
With the above as an example Broadband-Radar™ with a frequency shift of 65 MHz per millisecond
you can get good measurements.
- For an unambiguous runtime measurement with this radar are measurable only a maximum of 500 µs (see
Figure 1
)
which corresponds to a possible maximum range of 75 km. - The frequency deviation of 65 MHz per millisecond corresponds to a frequency changing of 65 hertz per nanosecond.
If the following filters are technically able to resolve differences in frequency of 1 kHz,
then herewith a measuring of time differences of 15 nanoseconds is possible,
which corresponds to a range resolution of about 2 meters. - If the maximum processable by the evaluation difference frequency is two megahertz,
which accomplish an easy one-chip microcomputer,
then distances of up to 4000 meters can be measured.
(Without a microcontroller would then need 4000 different individual filters operating in parallel.) - Due to the measuring method here is the
accuracy
of measuring approximately equal to the
range resolution
and is still limited by the resolution of the screen scale.
The FMCW radar can thus obtain a high spatial resolution with little technical effort.
To obtain the same resolution, a pulsed radar needs capable of measuring time in region of nanoseconds.
That would mean that the band width of this pulse radar transmitter must be at least 80 MHz,
and for digitization the echo signal needs a sampling rate of 166 MHz.
Non-imaging FMCW radar
Figure 9: Analogue display of radar altimeter
The measurement result of this FMCW radar is presented either as a numeric value to a pointer instrument
or digitized as alpha-numeric display on a screen.
It can be measured only a single dominant object but this one with a very high accuracy down to the centimeter range.
This method of distance determination is for example as used in aircraft
radio altimeter.
Even an analog pointer instrument can serve as an indicator for an FMCW radar (see Figure 9).
The moving coil meter has a greater inductive impedance for higher frequencies and therefore
exhibits a value dependent on the frequency, which is then, however, not linear.
[Update] | fsk คือ – Australia.xemloibaihat
����������Ф��Ţͧ�Ѿ������㹧ҹ��ҹ�к����§
�ѹ��� 20/02/2016 12:03:59
����������Ф��Ţͧ�Ѿ������㹧ҹ��ҹ�к����§
A
AC
��� �������¹������ (Alternating current)
Active
��� ἧǧ������Ѻ�������¹�������͡������絢ͧ����Ţ�ҹ�ͧ�����Ţ��� ���˹��·��١ ����¹������ҡ���������������´�ͧ���§����ҡ�����ҹ�� ����Ţ���������»��Ԩ������� 16 �Է �����ҡ���ҹ�鹶����ἧ��蹷��ա��� ��Ҩ������� 20-24 �Է
Active sensing
��� �к������㹡�õ�Ǩ�ͺ��ҡ���������� MIDI �ӧҹ������� ��觷ӧҹ�����Ѻ����ͧ�� �ѭ�ҳ��������ѭ�ҳ�������价������ͧ�Ѻ�ѭ�ҳ������������ҷء���ҧ�ӧҹ�繻��� �� ����к�active sensing �����ش�ӧҹ��������� ����Ѻ�ѭ�ҳ�ШѺ���������觼Դ�����Դ�����Ш� ��ش�ӧҹ�ѹ�� ���ҧ�á��� MIDI �ء��������Ѿ�����к� active sensing
ADSR
��� ��û�ͧ�ѹ��Ǩ�����¡������ �ѡ�� ����� ���� �Ŵ����¾������������繵�ǻ�ͧ�ѹ ����դ����Ѻ����ж١��Ѻ����ͧ�ѧ�������ѭ�ҳ���͡��ؤ�á� ���ҧ�á������ ��ͧ�ѹ��ǹ�� �Ҩ����� effects unit �����㹡�äǺ��� filter sweeps ��е����蹷��ӧҹ ������ �ѹ
AFL
��� �к����١���ἧ Mixing �����������ö�٤������§����ͧ������觵�駤������ fader ���� ���� level control ����ǹ �˭� AUX sends �ж١�Ѻ���ͧ��� AFL �ҡ���� PFL ��������������ö ��Ǩ�ͺ�ѭ�ҳ���§�١����ѧ effects unit ��
Aftertouch
��� ������ҧ�ѭ�ҳ�Ǻ�����觢������Ѻ�ç����������� MIDI ��� �ػ�ó���ǹ�˭���Ѿ���� aftertouch ���������ö��Ǩ�Ѻ�ç����������촷ء�������µ�Ǣͧ�ѹ�ͧ ��зӡ�õ�Ǩ �Ѻ�ç���������ҹ ᶺ sensor ��������ҹ��ͧ�������᷹ Aftertouch ����ö�١��� ��㹡�äǺ����ѧ���蹢ͧ���§����յ�����ҧ�蹤Ǻ������������� �������ҧ�ͧ filter �����ѧ��������ա�ҡ��� �͡�ҡ����ѧ����ö��㹡�äǺ�����Ҿ���������ͧ MDI effects ���ա�����蹡�õ�駤�� delay feedback ���� effect level
Alfa
��� ����Ѿവ version �ͧ software (�ҧ���駡��� bugs �Դ�Ҵ��� – �� Beta)
Algorithm
��� �����������������١�͡Ẻ��������㹧ҹ�������Ш� ���ͧ����� effects ��������ж١��㹡�����ҧ���ͤ������Ѻ special effects ��������ǹ��Сͺ�ͧ effects ��й͡�ҡ��� digital effects ��������١���ҧ�Ҩҡ algorithm �蹡ѹ
Aliasing
��� �ѭ�ҳ���͡�١���ͺ��������¹������ѭ�ҳ�ԨԵ�� �������ͧ�ѭ�ҳ����鷴�ͺ ���ҧ���¨е�ͧ�դ�����ͧ��Ңͧ�ѭ�ҳ input ����٧����ش��觶���ҡ���ӵ�� ��õ�Ǩ�ͺ�� �Դ�������Ѵਹ ���ͧ�ҡ���Ѿ����դ�ҹ����Թ�����������ö������㹡���к�ǧ�� �ͧ �ٻẺ������ ��м��Ѿ�����͡�Ҩ��������§���� �͡�ҡ������������ҧ�ѹ�ж١�������� ��ѭ�ҳ���§��������§�ա����
Ambience
��� �Ũҡ��÷�����§�з��ҡ��鹷�� ���١�ӡѴ�١�����ҡѺ���§�鹩�Ѻ Ambience �������§ �з�����ö���ҧ����������ػ�ó�ԨԵ�� ����ᵡ��ҧ�����ҧ Ambience �Ѻ Reverberation (���§�з�) ������§�з��ͧ Ambience ������ա�ô�������� � 㹢�з�� Reverberation ��������§�з������������֡�֧��Ҵ�ͧ��鹷����١�з�
Amp
��� ˹��¢ͧ�����俿�� (����繤���ͧ͢����� amplifier)
Amplifier
��� �ػ�ó�����㹡�������дѺ�ͧ�ѭ�ҳ俿��
Amplitude
��� �дѺ�ѭ�ҳ俿�� �������ö����ҧ�ԧ�Ѻ�дѺ���§
Analogue
��� ǧ��俿�ҷ�������������ͧ�ͧ�ç�ѹ���͡����俿���������ҧ�ѭ�ҳ
Anti-aliasing
filter
��� ��èӡѴ���Ф������ͧ�ѭ�ҹ���͡�������ŧ�� A/D ���ͷ���������٧�ش���� ����Թ���觢ͧ�����������㹡�÷��ͧ
Application
��� ���ͷ�������¡����������������
ASCI
��� �鴾�鹰ҹ�ͧ����ԡҷ����㹡���š����¹������ ������鴾�鹰ҹ ����Ѻ�ʴ�����˹ѧ��� ��������촤�����������ٻẺ�ͧ����Ţ�ҹ�ͧ
Attack
��� ���§����Դ����з��٧�ش�ҡ�á�з� (Maximum aplitude) ����Դ�ҡ��á�з���ͧ�� ��������㹢�з������ͧ�����Ẻ��� �Ъ��� compressor �Ѻ gate �������ҡ���Դ��á�� ������º��ҡѺ�������Ƿ���ǻ����ż� (processor) ����ö�����Ţ����ŷ�����Ѻ
Attenuate
��� ������дѺ level Ŵŧ
Audio frequency
��� ��ǧ�ѭ�ҳ�������������ö���Թ �¨����������ҧ 20Hz �֧ 20kHz
Aux
��� �����Ǻ���������躹ἧ�Ǻ����͡Ẻ�����͡�˹��ѵ����ǹ�ͧ��ͧ�ѭ�ҳ ���件֧ effects ���ͤ�Ǣͧ mix outputs (aux ʧ�ѭ�ҳ)
Aux return
��� Mixer inputs �١���������� effects ����� mix
Aux send
��� Physical output from a mixer aux buss
B
Backup
��� ��äѴ�͡ software ���͢����ŴԨԵ���������ͧ���ͤ�����ʹ���
Balance
��� ��������ѹ��ͧ channel level �����ҧ��ҹ���¡Ѻ��Ңͧ stereo record �����Ҩ�ж١������ �����¤�������ѹ��ͧ�дѺ�����ѧ�ͧ����ͧ�����������§��ҡ���ª�Դ�����㹡�� mix
Balanced wiring
��� �к����俷���ͧ������俿��Ẻ out-of-phase ��� screen Ẻ���������Ŵ�ѭ�ҳú�ǹ ��觻Ѩ��·�������Դ��� balance ����ջ���Է���Ҿ���ػ�ó����Ѻ����觨е�ͧ����� output ��� input ����ͧ��������з�������
Bandpass filter (BPF)
��� ��� filter ������Ѻ�¡���� ���� attenuate ��������������˹�����͵�ӡ��Ҥ������������� ������������� �ᶺ(band)�ж١�������Ӥѭ Bandpass filter ��ǹ�˭�ж١���繵���ѧ������㹡�û�Ѻ ⷹ���§
Bandwidth
��� ���Ըա���к����Тͧ��������觶١����ǧ��俿�ҵ�����ҧ�� ��⾧(amplifier) mixer ���� filter ���Тͧ���������ǹ�˭�ж١�Ѵ�ҡ�ش���level Ŵŧ� 3db �ҡ�ش�٧�ش
Beta version
��� Software ����ѧ������ҹ��÷��ͺ���ҧ����ó�����Ҩ���� bug �Դ�Ҵ���
Binary
��� �к���ùѺ�վ�鹰ҹ�Ҩҡ�Ţ�ͧ�����ҹ�鹤�� 1s ��� 0s
Bios
��� ��ǹ˹�觢ͧ�к���Ժѵԡ�âͧ�����������觨������ ROM �ҡ��������� disk ����ǹ����Ѻ �Դ�ͺ��÷ӧҹ��鹰ҹ�蹡�������ҹ���ǹ�ͧ disk
Bit
��� ��Ңͧ binary �� 1 �Ѻ 0
Boost/cut control
��� ��ǤǺ������Ƿ������ö��Ŵ�����������Тͧ����������ҹ�͡�Ҩҡfilter ���˹觷������ç ��ҧ�»��Ԩ���������˹� flat ���� no effect
Bouncing
��� ��кǹ��� mix �ͧ track ��ҧ � ������ҡ�����ͧ track ��Ҵ��¡ѹ��зӡ�úѹ�֡���Ѿ������ ŧ�� track ����
BPM
��� �ӹǹ beat ��ҷ� (Beats per minute)
Breath controller
��� �ػ�ó������㹡������¹ breath pressure �� MIDI controller data
Buffer
��� ǧ�÷��١�͡Ẻ�����ͪ���㹡���¡ effect �ͧ output �ҡ���觡��Դ���ͧ�ҡ ����ͧ�Ѻ�ա����͵�ҹ����觼�ҹ input ����� effect �Դ�Ҵ���
Buffer memory
��� RAM memory ���Ǥ��Ƿ��١��к���Ժѵԡ�ä���������ҧ�к����ͻ�ͧ�ѹ������������ͧ 㹡���觼�ҹ������㹡ó�������������١ú�ǹ�¡�ö١��ҹ� task ����
Bug
��� software ����դ����Դ���� �����ջѭ��
Buss
��� ��鹷ҧ㹡���Ѻ���ѭ�ҳ����硷�ԡ������ѭ�ҳ���� � mixer ˹�觵�� �������� buss ��� ��˹�ҷ���ҹ�����ŵ�ҧ������Ҩ��� stereo mix,groups, �ѭ�ҳ PFL, aux sends ������� ��е�ͧ�ա�è����㹡����ҹbuss
Byte
��� �����ǹ˹�觢ͧ�����ŴԨԵ�ŷ���Сͺ���� 8 �Է
C
Cardioid
��� �����Ժ�� polar response ����Դ�ҡ unidirectional ������ٻ�ç���� �����Ժ�� polar response ����Դ�ҡ unidirectional microphone
Channel
��� ᶺ���� control �������� mixing console �դ�������ѹ��Ѻ input ��������ͤ��ͧ
monitor input ��ѡ
Channel (MDI)
��� MDI ��ͧ�ѭ�ҭ 1 � 16 ��ͧ�ѭ�ҳ��� MDI data �Ҩ�١�觼�ҹ��èѴ��� data �¡���� ��ͧ�ѭ�ҳ ���� channel ���¶֧��÷�����ػ�ó� MDI ���ͪ����ǹ�ҡ���� 16 ��� �觼�ҹ �����������������������
Chase
��� �ӷ����Ժ�¢�鹵��÷ӧҹ����Դ�ҡ��÷���ػ�ó� slave ���������л���ҹ ������������ ����ѹ�ͧ�Ѻ�ػ�ó� master㹡óշ������Ǣ�ͧ�Ѻ�ӴѺ��鹵�ͧ MDI chase �Ҩ����ǹ ����Ǣ�ͧ㹡�õ�Ǩ�ͺ����ա������¹�ŧ�ͧ������Դ��� ��������ջѭ���������ͧ�ա�� �����ŧ�����������
Chip
��� ǧ��俿�ҷ��١�����Ҵ��¡ѹ
Chord
��� �굴���շ���ըӹǹ 3 ��Ǣ��� �١��蹾�����ѹ
Chorus
��� effect ����Դ�ҡ��������ѭ�ҳ������� delay ��� ��û�Ѻ�дѺ���§
Chromatic
��� ˹����Ѵ�дѺ���§����٧����繢�鹢ͧ semitone
Click track
��� ����ͧ��Шѧ��з����¹ѡ�����㹡�èѺ����
Clipping
��� ����������·���Դ�ҡ��úԴ�� ����Դ��������ѭ�ҳ��ѭ�ҳ˹�觾������١��������� ����˹���дѺ maximum �ͧ�ػ�ó������з�����ػ�ó��������ö�ͧ�Ѻ��
Clone
��� ��äѴ�͡��������ѹ�ء��С�� ��ǹ�˭����ҧ�ԧ�֧ digital copy �ҡ�ԨԵ�����ͫմ�
Common mode rejection
��� ����Ѵ���ǧ��俿�ҷ���� ����դ�������Ũ�����ö����ʸ�ѭ�ҳ�����������˹
Compander
��� ������������жʹ�����ػ�ó���ӡ�úպ�Ѵ�ѭ�ҳ������ҧ��úѹ�֡������ ��зӡ�� �ʹ��������͵�ͧ��â����ѭ�ҳ
Compressor
��� �ػ�ó����͡Ẻ������㹡��Ŵ�����������ͧ�ѭ�ҳ���§�¡��Ŵ�дѺ�ͧ high signal ���� �����дѺ�ͧ low signal
Computer
��� �ػ�ó쪹Դ˹�觷��������Ѻ����л����żŢ����ŴԨԵ��
Conductor
��� �Ѵ�ط���դ�����ҹ�ҹ������繵�ǹ�㹡���Թ�ҧ�ͧ�����俿��
Console
��� ���ա�ӷ�������¡ mixer (����ͧ������§)
Contact enhancer
��� ��觷��١�͡Ẻ��������������Է���Ҿ㹡�ù�俿����ػ�ó����ա���������͡Ѻ�����俿�� �� ����� ������º ��� edge connector
Continuous controller
��� ��ͤ��� MDI ��Դ˹�觷ն١�����Ͷʹ��Ҥ�������¹�ŧ������ͧ ������ҧ�� �ʹ��Ҩҡ pedal ǧ�������ͧ��ͤǺ��� breath control
Copy protection
��� ��鹵���١�������������Դ�����ͻ�ͧ�ѹ��äѴ�͡���������Ѻحҵ
Crash
��� �Ѿ����ŧ��������ͧ�Ѻ��÷ӧҹ�����軡�Ԣͧ�����������������з�����ͧ��ʵ��� ���������
Cut and paste editing
��� ��������ö㹡�äѴ�͡ �������� section ��ҧ�ͧ���§����Ѵ��ѧ location ����
Cutofffrequency
��� ����������٧�������͵�ӡ�����ѧ�ҡ����ա�� attenuation (Ŵ�) 㹵�ǡ�ͧǧ��俿��
Cv
��� ���‘�Ǻ����ç�ѹ俿��’ �����ͤǺ����дѺ���§�ͧ����ͧ���Դ�ѭ�ҳ(oscillator) ���� �������ͧ filter �����ͧ�ѧ�������ѭ�ҳ���͡ �������ǹ�˭�зӧҹẺ 1 ��ŵ��� �дѺỴ���§ ���ҧ�á������բ��¡���㹡��������ͧ���Դ�ѭ�ҳ���͡ pre-MIDI control ����Ҩ��繷��е�ͧ��������¹�ѭ�ҳ�ҡMDI �� CV
Cycle
��� �����蹷������ó�ͧ���§�˹�觷���Ҩҡ���觡��Դ ���ͤ��俿�ҷ����ҡѺ���§���� �����蹵�� 1 �Թҷ� �Ѻ�� 1Hertz (Hz)
D
Daisy chain
��� �ӷ����㹡��Ժ�¡�êش����������ͧ͢�����俿�������ҧ�ػ�ó� ��������� (module)
Damping
��� ����Դ���§�з� (reverberation) ����� damping ���¶֧ �÷��ôٴ����ͧ ���§�з��¾�鹼�ǵ�ҧ�������Ҿ�Ǵ��������
DAT
��� ���§ digital �������ͧ DAT �����ѹ���ҧ������¨��繷�����ѡ㹪��ͧ͢ R-DAT ���ͧ�ҡ�� ����� rotatinghead ��������Ѻ����ͧ�Ѵ�մ�����ǹ����Ѵ Digital ���� fixed head (�����ҹẺ�����ع) ������ҧ�� DCC ���ͷ�����¡������������ͧ S-DAT
Data
��� �����ŷ��١�������������ͧ����������
Data compression
��� �к������㹡��Ŵ��Ҵ�ͧ������ŧ��ж١�Ѵ�����к��ԨԵ�� ����к��պ�Ѵ������ ���§����ǹ�˭�ж١���¡����к� lossy ���ͧ�ҡ�ѭ�ҳ�鹩�Ѻ�ҧ��ǹ��١�Ѵ������ ����ѡ��÷�����¡��� psychoacoustic ��觶١�͡Ẻ������������������ѭ�ҳ��ǹ������ ����ö���Թ��ҹ�鹷��ж١�Ѵ�͡�
DB
��� ഫ��� ����˹��·����㹡����������дѺ��������ѹ�������ҧ 2 �ç�ѹ ���͡��ѧ俿�� �������§
DBm
��� ������ҡ���¢ͧഫ��� (dB) ��觶١᷹��Ҵ��µ���Ţ 0dB = 1mW = 600 ohms
DB/octave
��� ����Ѵ��Ż�ͧ filter ������� dB ��� octave �ҡ���������� ��Ż �ͧ filter ��Ъѹ����ҡ ��ҹ��
DBv (dBu)
��� ������ҡ���¢ͧഫ��� (dB) ��觶١᷹��Ҵ��µ���Ţ 0dB = 0.775 ��ŵ�
DBV
��� ������ҡ���¢ͧഫ��� (dB) ��觶١᷹��Ҵ��µ���Ţ 0dB = 1��ŵ�
Dbx
��� �����㹡��Ŵ���§ noise �¡��������Ͷʹ���� ��觵���зӡ�úպ�Ѵ�ѭ�ҳ� �����ҧ����Ѵ���§��ШТ������§����Ѻ����� ��������Դ�ѧ
DC
��� ����ʵç
DCC
��� �� format �ͧ�����ҹ����Ѵ�ԨԵ��Ẻ�����ع �Ѳ���� Philips ����� �к���úպ�Ѵ ������㹡��Ŵ��Ҵ�ͧ�����ŷ����繨е�ͧ�١���ѡ��
DCO
��� Digitally controlled oscillator ���͡�äǺ�������ͧ���Դ�ѭ�ҳẺ�ԨԵ��
DDL
��� Digital delay line
Decay
��� ���Ŵŧ�ͧ amplitude �ͧ���§�˹�� �����ѭ�ҳ俿����������Ҽ�ҹ� ��觶�Ҿٴ�֧��� ADSR envelope shaper ��ǧ����ѭ�ҳ�����������ŧ (decayphase) �������������� attack phase ����㹨ش�٧�ش ���������ҧ���decay phase ���Թ������ �дѺ�ѭ�Ҩ�Ŵŧ�����¨����� ��дѺ��������駤����� (sustain level)��ѧ�ҡ����ѭ�ҳ �ѧ����Ǩ��������дѺ��������Ҩ� release �����觨��繪�ǧ���ǡѺ��� release phase �������
De-esser
��� ����ͧ���������ѺŴ effect �ͧ sibilance ��ѭ�ҳ���§
Defragment
��� ��кǹ��èѴ�����캹���촴�ʡ����ͨѴ������������ҧ� ���� free space ����Դ�ѹ
Deoxidising compound
��� ���÷��١���ҧ������ͷӤ������Ҵ��� oxide ����Դ�ҡ�����������俿��
Detent
��� ������ stop �������ç��ҧ�ͧἧ�Ǻ����蹻��� pan ���� EQ cut/boost
DI
��� ��ǹ����ѭ�ҳ�١���º����µç��ѧ audio chain ��������� ����⿹���� (����Ҩҡ����� direct inject)
Di box
��� �ػ�ó쪹Դ˹�觷����㹡�èѺ��������ҧ�дѺ�ѭ�ҳ�Ѻ������ҹ�ҹ�ͧ���觡��Դ����յ�� ����ͧ�������mixer input
Digital
��� �к�俿�ҷ���ʴ�����������ѭ�ҳ��ٻẺ�ͧ code ��Сͺ���� 1s��� 0s
Digital delay
��� ��ǻ����żŴԨԵ���������ҧ�Ϳ���§ delay ��� echo (�� DDL)
Digital reverb
��� ��ǻ����żŴԨԵ������Ѻ��е�鹡���з��ͧ���§
DIN connector
��� �繿�������ͧ������������ѭ�ҳẺ Consumer multipin signal connection �͡�ҡ����ѧ ������Ѻ����Թ���MIDI �ա���� �����Ẻ pin ������͡��ҡ���ª�Դ
Direct coupling
��� ����������ͧ͢ǧ��俿���ͧǧ�� ��������ѭ�ҳ AC ��� DC ����ö�Թ�ҧ�֧�ѹ��
Disc
��� �ӷ����ٴ�֧ vinyl disc, �մ�, MiniDisc ���� DVD
Disk
��� ���������� floppy, hard ��� removable disk (����Ҩҡ����� diskette)
Dither
��� �к�㹡���������§ noise ���������ŵ����ѧ�ѭ�ҳ���§���١����¹����繴ԨԵ�����ͷӡ�� ���� noise ����դ������Ѵ��� ��觨��ռŷ���� noise performance Ŵŧ
DMA
��� Direct memory access (�����Ҷ֧ memory �µç) �������ǹ˹�觢ͧ�к���Ժѵԡ�� �������������������ػ�ó��ǧ����ö������á�� memory �ͧ�����������µç������ ��ͧ��ҹ˹��»����żš�ҧ���� CPU
Dolby
��� �к���������жʹ���ʢͧ���Ŵ noise �����ͧ�ѹ�֡���§ ����к����зӡ�â����ѭ�ҳ ������дѺ��Ӥ�������٧������ҧ��úѹ�֡���§ ��ѧ�ҡ��鹨�����鹵������������ҧ�Դ�ѧ ��觨����к� Dolby system��ҡ���·����������� type B, C ��� S ����Ѻ���ͧ�����ҹ ���semi-professional ����Ѻ type A �Ѻ SR �����������Ѻ����Ҫվ ���ҧ�á�����úѹ�֡ ���§�����к���ҧ��������ҹ�鹨е�ͧ�١ replay ��к������ҹ��
DOS
��� �к���÷ӧҹ�ͧ Disk �������ǹ˹�觢ͧ�к���÷ӧҹ�ͧ PC ��Ф��������������� ��º��� PC
Driver
��� �����ǹ�ͧ�Ϳ�������Ѻ�Դ�ͺ���������������ҧ�������ѡ����ػ�ó��������� ������ҧ�� sound card,�������� ���� �ʡ�����
Drum pad
��� ��鹼�Ƿ���Դ�ҡ����ѧ������ ����ö���ҧ��á�е��㹡���Դ�ѭ�ҳ俿������Ͷ١�մ������ ��ͧ
Dry
��� �ѭ�ҳ������������١����Ϳ
DSP
��� ��ǻ����ż��ѭ�ҳ�ԨԵ�� �����êԻ����ջ���Է���Ҿ�٧��㹡�û������ѭ�ҳ�ԨԵ��
Dubbing
��� ������� material ���� ��ѧ��� record ��������� ��觤����������ǡѺ����� overdubbing
Ducking
��� �к����������Ѻ�Ǻ����дѺ�ͧ�ѭ�ҳ���§�����Ѻ���ҧ��� �� ���§�ŧ background ����ö�١����¹�� duck ����������������� voiceover
Dump
��� �����觼�ҹ�����ŴԨԵ�Ũҡ�ػ�ó�˹�觶֧�ա�ѹ A Sysex dump ���¶֧ �������¢������ �ѧ����ͧ�������������ŷ���ͧ��ü�ҹ MIDI ����Ҩ��㹡���� sound patch, ����絤�� parameter �������
DVD
��� �蹴�ʡ����ջ���ª����ҡ���� �դ������٧ ����ö��������§����ҡ���� ����֧�մ������ �����Ť��������� ��ҧ�
Dynamic microphone
��� ������⿹��Դ˹�觫��������俿��㹡�÷ӧҹ ���յ��������(diaphragm) �� ˹�ҷ����ع���Ǵ����ʹ���������
Dynamic range
��� ���Тͧഫ��������ҧ�ѭ�ҳ����٧����ش����ػ�ó�˹�觪������ö�Ѻ������дѺ����ѭ�ҳŴ ��Ҵŧ����з��������С����繤�� Noise Floor
Dynamics
��� �繤ӷ�������¡�дѺ level ���������ŧ���ǡѹ
E
Early reflections
��� ���§�з��á����з��Ҩҡ��ᾧ ��� ���ྴҹ ��觨��Դ��ѧ�ҡ������§�ա���§���١�Ѵ ���ͧ����ա���з��ͧ�ѧ���
Effect
��� �ػ�ó�����㹡�û�Ѻ���§ audio ���ͷ������ҧ����Դ���§����դ���creative �ҡ��� ����Ϳ ��ǹ�˭� ���� ��÷�����Դ��ô�����ͧǧ�� 俿�� ������ҧ���§�з� ��� echo
Effects loop
��� �к�����������ͷ�������������ͧ�������ѭ�ҳ��¹͡�������͡Ѻaudio chain ��
Effects return
��� ��� mixer input ������͡Ẻ��������Ѵ��áѺ output �ҡ effects unit
Encode/decode
��� �к����зӧҹ����������ա�� process �ѭ�ҳ������Ѵ���§ ��ѧ�ҡ��� process ����� ���Ǩзӡ��reverse ����ѹ�ͧ ������ա��������§����Ѵ���
Enhancer
��� �ػ�ó좹Դ˹�觶١�͡Ẻ�����ͷ���� audio material �ջ���Է���Ҿ��������������Ԥ �����������ҧ������ҧ�� ��÷�����Դ������ҡѹ�ͧ dynamic, phase shifting ��� harmonic generatio
Envelope
��� �Ըշ�������дѺ�ͧ���§�����ѭ�ҳ�դ�����ҡ������������Ҽ�ҹ�
Envelope generator
��� ǧ��俿�Ҫ�Դ˹�觷���դ�������ö㹡�������Դ�ѭ�ҳ�������ö�Ǻ����� ��觨з�˹�ҷ�� �� envelope �ͧ���§��������ͧ��ù������ҧ���� �͡�ҡ����ѧ�Ҩ����㹡�äǺ����дѺ �ͧ����ͧ���Դ�ѭ�ҳ �������觡��Դ���§ ���ҧ�á��� envelope �ѧ����ö��㹡�� �Ǻ��� filter ���� ����絤����������ա���� ��觵�Ƿ�������ѹ�ҡ����ش��� ADSR generator
Equaliser
��� �ػ�ó��������͡�Ѵ����������ǹ��ҧ�ͧ audio spectrum
Erase
��� ���ź���§�ѹ�֡��ҧ�ҡ���͡ ����ź�����ŴԨԵ�Ũҡ���觷�����红�����
Event
��� 1 �ٹԵ�ͧ MIDI data ������ҧ����ûԴ-�Դ��˹�觵�����ͪ����ǹ˹�觢ͧ information �ҡ��ǤǺ��������������¹�������������ա�ҡ���
Exciter
��� enhancer ���˹�觷��ӧҹ�¡���ѧ���������§����ҹ����������դ�������٧
Expander
��� �ػ�ó����͡Ẻ������������ level �ͧ�ѭ�ҳ��������� ������� level �ͧ�ѭ�ҳ ��������٧ ���ͷ��Ъ���㹡���������Тͧ dynamic �ͧ�ѭ�ҳ����
Expander module
��� ��ǻ����żŷ������������� ��ǹ�˭����Ẻ rack-mountable ����������ٻẺ�������� �ѡɳС�зѴ�Ѵ
F
Fader
��� �����Ŵ�����Ǻ��� potentiometer �������� mixer ��е�ǻ����ż�����
FET
��� Field effect transistor ���ػ�ó���á�觵�ǹӪ�Դ�������� (Unipolar)
Figure-of-eight
��� ��ú������ѡɳС�õͺʹͧ�ͧ��������Ǩҡ����⿹����դ���sensitive ��駴�ҹ˹�� ��д�ҹ��ѧ �������Ѻ�ѭ�ҳ����Ҩҡ��ҹ��ҧ
File
��� ��ʵ�ͧ�����ŷ���դ����Ӥѭ��ж١�������ٻẺ�ԨԵ������ҵðҹ MIDI ������ ��Դ����դ�������ö��㹡���������ӴѺ�ͧ�������ա���š����¹�����ҧ��Դ�������� ����ᵡ��ҧ㹡�èѴ���§�ӴѺ sequence
Filter
��� ǧ��俿�� �١���ҧ���������������Ŵ���Тͧ��������ҧ����ͧ���
Flanging
��� Modulated delay effect ����� feedback 㹡�����ҧ dramatic ���� sweeping sound
Floppy disk
��� ��ʡ��������������㹡�����������״���蹢ͧ����������͡�ҧ �١��è�������ʾ��ʵԡ �������٧�ش�ͧ High Density Disk �ҵðҹ��������1.44Mbytes ��觡�˹�ҹ���ա���� Double Density disk ����դ���������������Դ���觢ͧ High Density Disk
Flutter echo
��� ���§ echo ����ҡ���������§�з�仡�Ѻ�����ҧ�ͧ��鹼�Ƿ�袹ҹ�ѹ
Foldback
��� �к����������Ѻ�������������§ mix �����������Ѻ��÷ӧҹ㹢�����ǡѹ���ա�� �ѹ�֡��� overdubbing 仴��� �������¡�ա���ҧ��� cue mix
Formant
��� ��ǹ��Сͺ�ͧ��������������§��ͧ���ѧ�Ҩҡ����ͧ������������§ �������������§ pitch ���� ���Դ�������¹�ŧ���������ͧ ������ҧ���������蹡յ������§��ͧ�ͧ����굷��ѧ �͡�Ҩ��դ�������� �������¹�ŧ仨ҡ���
Format
��� ��鹵�����㹡�÷�����ʡ�����������դ��������㹡�÷ӧҹ ��觡�� format �з���� ��鹼�Ǣͧ��ʡ�١���§���絢ͧ��ͧ��ҧ��ҧ���ٻẺ������ùԤ������Ҷ���红����� ���»��Զ��������������ҧ�ѹ�к���� format ��е�ҧ�ѹ仴���
Fragmentation
��� ��鹵����Դ�ҡ��÷�� space �����ҧ�����������躹��ʡ�١���͡����ǹ�����������ǹ ���ͧ�ҡ��������� ���ź��� (�� Defragment)
Frequency
��� �ѭ�ҳ���觺͡����ա���Դ��Ӣͧ waveform ������� 1 �Թҷ� ���waveform ����Դ��� ���������� 1 �ҷը��դ������������ 1Hz
Frequency response
��� ˹��¡���Ѵ�ͧ���Ф������ �������ö�Ѵ���¡�����ػ�ó�������ùԡ�� ��������ͧ ��Ш�����§
FSK
��� �Ըա�úѹ�֡ sync clock signal �� �ʴ�����ѭ������ 2 ⷹ���§��Ѻ�ѹ (�������Ҩҡ Frequency shift keying)
Fundamental
��� ���§���������Сͺ���¤�������鹰ҹ, harmonic ��� ����դ�������٧㹺ҧ��ǹ����� ������
FX
��� �š�з��������Դ���§ ����դ�����Ҩҡ �Ϳ (affect)
G
Gain
��� �ӹǹ�ͧ�ѭ�ҳ���١������ circuit ����ǧ��俿��
Gate
��� �ѭ�ҳ俿�Ҫ�Դ˹�觷��١���ҧ�������������������ա�Ŵ key ���������������ùԡ�� ��� �Ըչ���������������÷ӧҹ�ͧ envelope generator ��� event ����
Gate (processor)
��� �ػ�ó�������ùԡ�좹Դ˹�觷��١�͡Ẻ��������㹡�� mute �ѭ�ҳ����դ�������� ���ͷӡ�û�Ѻ��ا noise performance ������ҧ��� pause ���Ф��駢ͧ material ��ҧ�
General MIDI
��� spec ���������鹨ҡ MIDI Ẻ��Ԥ �����������ͧ���Ҷ�������ŧ��ٻẺ GM format ���� spec �ͧ�ѹ�Ф�ͺ����件֧��Դ���program number �ͧ���§��ҧ�, ����Ţ�鹵�� �ͧ polyphony ��� mu’titimbrality, ��õͺʹͧ��͢����ŷ����㹡�äǺ��� ��������ա �ҡ���
Glitch
��� ���������Ǣͧ�ѭ�ҳ����������ѹ��� ������������˵ء�ó�㹡óշ���ػ�ó���� ���˹���Դ�����Դ��������������ö�ӧҹ����Ǥ��� ������ҧ�� �����Դ���§������ ����� ���˵غ� DAT�����¡��� glitch �������ѹ
Gm reset
��� ��������� Universal Sysex �����˹�ҷ��㹡���Դ mode ��÷ӧҹẺGeneral MIDI �� �ػ�ó� GM ��觤�������ǡѹ���з��������Ǻ�����������Ѻ��������� default �ͧ�ѹ ��� �зӡ�ûԴ������������ѧ���������Ш��բ�ͤ����駢������� ‘all notes off’
Graphic equaliser
��� ��� equaliser ��觼��Ѿ���ͷ���� narrow segment �ҧ��Ǣͧ audio spectrum �١�Ǻ��� �� Cur ���� boost fader ������˵ط�����¡���graphic equaliser �Ҩҡ��÷����˹觢ͧ��� fader ��ҧ��ա������ҿ�Ԥ�ͧEQ curve
Ground
��� ��´Թ cr 0 ��ŵ� 㹡���Թ������ѡ ��´Թ�������ʡѺ��鹴Թ����������͡Ѻ�����Ϳ��
Ground loop
��� ��Ҿ�Ǵ���������������ǧ��俿�Ҷ١�Ӿ���ѧ������Թ����������͡Ѻ�к� audio ����͡����俴ѧ����Ƕ١�ѡ���� Main supply ���ͧ�з�����Դ���Ѿ�������¡��� hum result
Group
��� �ش�ͧ�ѭ�ҳ㹵�� mixer ���١�����Ҵ��¡ѹ ������ѧ�ҡ��鹨��Թ�ҧ��ҹ fader ���� ������ͷ�����Դ��äǺ�������� ���� multitrack mixer ���ա�� mix �ѭ�ҳ����� ����������������ö�觵����ѧ input �ͧ��Ǻѹ�֡���§ (recorder track) ���µ�Ǿ�����ѹ
GS
��� ����������Ե�� Roland ����Ѻ General MIDI protocol
H
Hard disk
��� �ػ�ó�Ѵ�红����Ţͧ�������������դ������٧ �ӧҹ�¡���Ѻ����¹ rigid disk ���� ������ͺ��÷���դس����ѵ���������硺������ŷ��١�ѹ�֡
Harmonic
��� ��ǹ��Сͺ� wave form ����դ����Ѻ�� ����դس����ѵԤ�������дѺ�٧
Harmonic distortion
��� ��ǹ��������ͧ harmonic ��������١�ʴ���ѭ�ҳ�鹩�Ѻ
Head
��� ��ǹ�Тͧ����ͧ��� ���� disk drive �������ҹ ������¹������ŧ�� storage media
Headroom
��� ��Ңͧ dBs ����դ�����ʹ��� ��觤�Ҩ����������ҧ��Ңͧ�ѭ�ҳ�����ѧ��觼�ҹ�ػ�ó��� ˹������դ�Ҥ����դ����㹨ش�٧�ش�Ѻ ��Ңͧmaximum level ����ػ�ó���˹������ö�Ѻ��
High-pass filter (HPF
��� ������쪹Դ˹�觷���˹�ҷ��Ŵ������������դ�ҵ�ӡ��Ҥ�� cutoff �ͧ����ѹ�ͧ
Hiss
��� ���§ noise ����Դ�ҡ�����ѹ�ǹ�ͧ�����俿�ҷ���Դ���Ẻ random
Hum
��� �ѭ�ҳ����Դ����á�� �����˵��Ҩҡ��÷�� low frequency �١����������ѭ�ҳ ���� �»��Ԩ��դ�������Ǣ�ͧ�Ѻ�������ͧ�����俿����ѡ�µç
Hz
��� ˹��¢ͧ������� (�������Ҩҡ����� Hertz)
I
IC
��� ǧ��俿�ҷ��١�����Ҵ��¡ѹ (�������Ҩҡ����� Integrated Circuit)
Impedance
��� ���ѡɳ����� AC resistance ���ǧ��俿�ҷ���դس���ѵ�㹡�õ�ҹ�ҹ��С�Ф�鹡���Դ ��ԡ����ҷ���ͧ���ҧ�������㹵�����ǡѹ
Inductor
��� ��ǹ��Сͺ����դس���ѵԡ�е�鹡���Դ��ԡ����ҷ���ʴ����������鹢ͧ impedance ��ҹ �������ͧ�ѭ�ҳ
Initialise
��� ��� restore �ػ�ó���˹�����Ѻ����� default setting ��������Ѻ��ҷ��١���Ҩҡ �ç�ҹ���ѵ��ѵ�
Insert point
��� ����������ͷ�������� external processor �������͡Ѻ�ҧ�Թ�ѭ�ҳ����ռŷ�����ѭ�ҳ ��ż�ҹ��� external processor
Insulator
��� ��ʴط���դس���ѵԷ��������俿���������ö��ҹ��Ǣͧ�ѹ��
Interface
��� �ػ�ó쪹Դ˹�觷���˹�ҷ�������͡�ҧ�����ҧ�ػ�ó��ҧ������ͧ��Ǣ��仵�����ҧ�� interface �ͧ MIDI ���������ö��觧ҹ�������������������áѺ�ػ�ó� MIDI��� ������촵�ҧ� ��
Intermittent
��� ������¡�����Դ���Ե�ҧ����Դ����繤��駤�����ҹ��
Intermodulation
distortion
��� �ٻẺ�ͧ��úԴ����������������ҧ����仨ҡ�ѭ�ҳ original ����Դ����繻�Ш� ��������˵���ѡ�Ҩҡ��� sum ��� ���� ��ҡ���¢ͧ������� original
I/O
��� ��ǹ˹�觢ͧ�к�����Ѻ�Դ�ͺ���ǹ�ͧ output ��� input �ͧ����к��ԨԵ��������ͤ
IPS
��� ��Ҥ������Ǣͧ tape speed (�������Ҩҡ����� Inches per second)
IRQ
��� ��ǹ˹�觢ͧ�к���÷ӧҹ�ͧ������������حҵ����ػ�ó�����ѧ�������������� request ��ѧprocessor ���ͷ��зӡ���觶��¢����������ҧ�ػ�ó��鹹�鹡Ѻ processor
(�������Ҩҡ interrupt request)
Isopropyl alcohol
��� ��š�����쪹Դ��������㹡�÷Ӥ������Ҵ ��Һ�ѹ���Դ���躹����ͧ��� ��������ҹ
J
Jack
��� ����������� audio ����Ѻ����к� mono (TS) ��� stereo (TRS)
Jargon
��� ���Ѿ��ҧ�Ԥ���١������ǡѺ����ͧ�зҧ
K
K
��� ����ͷ�������ҧ˹�Ҥ���������ͺ觺͡����ҳ �� ���������Ѻ 1000 (kilo)
KHz
��� �դ����ҡѺ 1000Hz
KOhm
��� �դ����ҡѺ 1000 ohms
L
LED
��� ��ʹ����硵����ͧ�ʧ ����俪�Դ solid state
LCD
��� ���Ҿ��֡���� �����Ө��Ҿ������ѡɳ��繢ͧ����������������ù���Ѵ���������ҧ ��������ͧ��� (�������Ҩҡ����� Liquid crystal display)
LSB
��� byte ��Ƿ���դ����Ӥѭ���¡��� ����ҡ�����Ū��˹�觨е�ͧ�١����ٻẺ2 bytes ���˹�觨� �ʴ���ҵ���Ţ����٧㹢�з���ա��Ǩ��ʴ���ҵ���Ţ����ӡ��� ��觨������Ѻ�ӹǹ�Ժ��� ˹��µ�ҧ���к��Ţ�ȹ�����觵���Ţ����դ���٧���Ҩ��դ����Ӥѭ�ҡ����ش� message ������١�� ���� ���¡���ҧ��� MSB (Most significant byte) ������¤�������� byte ����դ����Ӥѭ�ҡ����ش
Limiter
��� �ػ�ó����յ�� output ���������µç�Ѻ input �������
Line level
��� �дѺ�ͧ�ѭ�ҳ�������դ����Ӥѭ�ҡ�ѡ���������ҳ -10dBV ����Ѻ�ػ�ó� semi-pro ���+4dBu ����Ѻ�ػ�ó�������дѺ����Ҫվ
Load
��� ǧ��俿�ҷ��֧俨ҡ�աǧ�� ���ͨҡ��Ǩ�����ա���˹�� �͡�ҡ����ѧ��˹�ҷ���觼�ҹ������ ��ѧ����ͧ�����������ա����
Local on/off
��� �ѧ����˹�觷��������ǹ�ͧ���������е�ǡ��Դ���§� keyboard synthesizer ����ö�� �¡�ѹ�����ҧ�������
Logic
��� ��Դ�ͧǧ��俿��������Ѻ process �ѭ�ҳ binary signal ����Сͺ�����дѺ voltage �ͧ �дѺ ���ᵡ��ҧ�ѹ���ҧ����ԧ
Loop
��� ǧ�÷���� output �������͡Ѻ input
Low frequency
oscillator (LFO)
��� ����ͧ���Դ俷��١�������觡��Դ modulation �»��Ԩе�ӡ��� 20 Hz ��� waveshape �ͧ LFO �����繺��·���ش��� sine wave ���ҧ�á����»��Ԩ�����ö���͡��������Ẻ �����Ҩ��� sine,����������,����������, ���� sawtooth waveforms
Low-pass filter
(LPF)
��� filter ����˹�ҷ��Ѵ�����������٧ ���Ҥ�� cutoff �ͧ����ѹ�ͧ
M
MA
��� ���������� ������ҡѺ 1000 �����
MDM
��� ����Ҩҡ Modular digital multi track; ��Ǻѹ�֡�ԨԵ�ū������ö����������Ǿ�����ѹ���� �ͧ�Ѻ��÷ӧҹ����ҳ�ҡ��������� ᷹��������������
Meg
��� �ӷ�������¡����ҳ 1,000,000 Ẻ���
Memory
��� RAM memory �ͧ����������١���������ѡ���������ҧ���Т����� ��觢�����㹹������ 件�һԴ���������� �ѧ��鹤�è�૿���������蹴����� disk �����ػ�ó��������������
Menu
��� ��ʵ�ͧ������͡���������躹˹�Ҩͤ������������ͨҡ�ػ�������������˹�Ҩ��ʴ���
Mic level
��� �ѭ�ҳ��������Ӷ١���ҧ������⿹ ��觨е�ͧ�١�������¤��駡��Ҩ�����ö�������� � line level ��
Microprocessor
��� ���êԻ����͡Ẻ��������ç�ٹ���ҧ�ͧ��������� ��觷�˹�ҷ��㹡�äǺ��� ��ҹ ��������еͺʹͧ�����ŵ�ҧ�
MIDI
��� �ҵðҹ����Ѻ�������������§�ŧ���������ٻ�ͧ����Ţ
(�������Ҩҡ����� Musical instrument digital interface)
MIDI analyser
��� �ػ�ó����ʴ� visual readout �ͧ MIDI activity ����Ͷ١�������������ҧ�ػ�ó� MIDI �ͧ���
MIDI bank change
��� ��ͤ��������㹡�äǺ�����Դ˹�觫�觵�ǹ���������Ѻ���͡�����红����Ţͧ����� MIDI ����͵�ͧ�������� 128 ���������
MIDI control change
��� ��ͤ�������ҹ��зӡ���觼�ҹ positional information ����դ�������Ǣ�ͧ�Ѻ performancecontrol ������ҧ�� wheels, pedals, ��Ե�� ��� �ػ�ó����� ��觢����žǡ��� ����ö������㹡�äǺ����ѧ���蹵�ҧ��� �� vibrato depth,brightness, portamento,effects levels ��� �������������� ���ͷ�����¡��� MIDI controller ���� controller data
MIDI controller
��� �繤ӷ�������¡ physical interface ������ػ�ó���ѡ�������㹡���������ͧ MIDI synthesizer ���� ����ͧ���Դ���§���� ������ҧ�ͧ�ػ�ó�Ǻ����������ҡ��� ���� �������, drum pads,wind synths �������
MIDI file
��� ��� Format �ͧ����ҵðҹ������红������ŧ���١�ѹ�֡���ŧ�� MIDI sequencer ��� �����ŷ��١����������ö��ҹ����������������ͧ����ͧ MIDI sequencer
MIDI implementation chart
��� chart ��Դ˹�� ��ǹ�˭����㹤����ͧ͢ MIDI ��觨��բ������к������� chart Feature �ͧ MIDI ����˹��ҧ����к�����ö support �� ��� Feature �����������ѭ�ѡɳ��Ţ 0 ������� ��е�Ƿ����� support ��������ͧ���� X ��駹���Ҩ���բ��������ǹ����������� �� the exact from of bankchange message
MIDI in
��� socket ���������Ѻ �Ѻ�����Ũҡ��� control ������� ���� �ҡ MIDI Thru socket �ͧ slave unit
MIDI merge
��� �ػ�ó� socket ��Դ˹�� ���� sequencer function �����������ö��������ѭ�ҳ MIDI �ͧ ���蹢�����Ҵ��¡ѹ��
MIDI mode
��� ������ MIDI ����ö�١��ҹ���ػ�ó��Ѻ�ѭ�ҳ MIDI �������Ը� �Ըշ����������ҡ����ش ��� �����ҹ�������ѭ�ҳ���§������ѹ�� single MIDI channel (poly-omni off mode) ��� Omni mode ������ػ�ó�MIDI ����ö��蹢����ŷ�����������������ѹ�ء�ѹ����� ��ͧ�ӹ֧�֧channel
MIDI module
��� �ػ�ó���Դ���§��Ƿ������� keyboard
MIDI note number
��� key �ء��Ǻ� MIDI ��������յ���Ţ�繢ͧ�ѹ�ͧ������������ҧ 0-127�� 60 ᷹��� middle C ���㹺ҧ�к��� C3 㹢�з���������� C4
MIDI note off
��� ��ͤ������١����ѧ�ҡ����¤���
MIDI note on
��� ��ͤ��� MIDI ���١��������굵�ǹ�鹡��ѧ�١��� ���ͤ���١������
MIDI out
��� MIDI connector ��㹡���觢����Ũҡ�ػ�ó����������ѧ MIDI �����ѧ������������Ѻ slave device
MIDI port
��� ����������͵�ҧ�ͧ�ػ�ó� MIDI �������ö��ҹ���ѹ�� ��觤���� multiport ����Ѻ MIDI interface �����¶֧�ػ�ó��Ƿ���� output sockets ������ѹ㹵������ ������� socket ���� ��������ö㹡���觶��¢����ŷ������ѹ��Ѻ�絵�ҧ�ͧ 16 MIDI channels Multiport �١ �͡Ẻ�������ͧ�Ѻ��÷ӧҹ����Թ���� limit ����˹���� �ͧ 16 MIDI channels
MIDI program change
��� ��Դ�ͧ��ͤ��� MIDI �������������¹ patch ���§��ҧ溹 remote module ����������¹ �Ϳ patch �� MIDI effects unit
MIDI splitter
��� ��ǻ���ҹ�����ҧ���§����� �����ա����˹�觤�� MIDI Thru box
MIDI sync
��� ���Ժ���к� synchronisation systems �������ö��ҹ��Ѻ MIDI user, MIDI Clock ��� MIDI Time Code
MIDI thru
��� ����Ѻ���� socket �� slave unit �١�����������§ MIDI ����� socket�ͧ unit ���Դ�ѹ
MIDI thru box
��� �ػ�ó����˹�ҷ���¡�ѭ�ҳ MIDI ���١���͡�ҡ�ػ�ó�������� ���� sequencer ���� ��ա����§������������ѭ�ҳ��ҧ���Ҵ��¡ѹ ��觨���ǧ��俿�Ҫ��·�˹�ҷ��㹡�� buffer �����繵�ǡѹ������Ѻ�ѭ�ҳ output ��ҧ����ͻ�ͧ�ѹ�������Դ�˵آѴ��ͧ����Դ�ҡ����� �ҹ single MIDI output 㹡�äǺ����ػ�ó����������������ǡѹ
Minidisc
��� consumer audio disc �����ҹ�Ѻ��úպ�Ѵ������ ����ǹ�˭�ж١��㹡�úѹ�֡���§ stereo ���Ҩ��㹡�����ѡ�� multichannel audio ��� �����Ť���������������蹡ѹ
Mixer
��� �ػ�ó���������Ѻ����ѭ�ҳ���§������ͧ�ѭ�ҳ����
Monitor
��� ����ͧ�������§�����㹡�� mixing
Monitor
��� ��͡�ÿѧ���§ mix �����ѭ�ҳ���§����դ�����
Monitor
��� VDU display ����Ѻ����������
Monophonic
��� ��������굷���˹�觵�ǵ�ͤ���
Motherboard
��� ἧǧ����ѡ���㹤����������Ƿ��١�������͡Ѻ�ػ�ó�������ǹ��Сͺ����
MTC
��� �к���û�Ժѵԧҹ�ͧ MIDI sync ����վ�鹰ҹ�ҡ�ҡSMPTE timecode (�������Ҩҡ����� MIDI Time Code)
Multi-sample
��� ������ҧ sample ������� ������е�Ǩ������� limit �ͧ musical range ����ҧ�ѹ ������� ��·��Դ�鹢�����ͼ�Ե range �ͧ���§����դ����繸����ҵ��ҡ������ͻ���ҹ�Ѻ range �ͧ����ͧ����շ����ѧ�١������� ������ҧ�� ����˹�觵���Ҩ��ͧ�١�ӡ�� sample ���ͷ� �ͺ�ء��ͧ������� semitone ���ͷ�������§����͡���繷���Ҿ��
Multitimbral
��� ��� synthesiser ���� module �������ö����ŧ�������ǹ����������ǡѹ ������� ��ǹ�������������Ǻ����ͧ MIDI channel �����ѹ
Multitimbral module
��� ���觡��Դ���§�ͧ MIDI �դ�������ö㹡�ü�Ե���§����ҧ�ѹ��������§������� ���ǡѹ����������§�ж١�Ǻ����� MIDI channel �����ѹ
Multitrack
��� �ػ�ó��Ѵ���§��Դ˹�觷������ö�Ѵ���§ parallel ���� track ��ҧ������ѧ�ҡ��鹨ж١���� mix �����Ѵ�������ѧ�����ҧ�����
N
Near field
��� �к��ͧ����ͧ�������§���١�͡Ẻ�����������͵Դ������Ѻ���ѧ ��觻���ª�� �ͧ�ѹ���ͼ��ѧ ��������§ direct sound �ҡ��⾧�ҡ����������§�з��ҡ���� ��ͧ��Ŵŧ ���ͷ��ҧ�����¡��� close field
Noise reduction
��� �к������㹡��Ŵ���§ noise �ҡ���͡����Ŵ�дѺ�ͧ hiss ����Դ��������ҧ����Ѵ���§
Noise shaping
��� �к����������Ѻ���ҧ digital dither ����ռŷ�������§ noise ��������١��������Ҷ١ ����¹����ǹ˹�觢ͧ audio spectrum ����դ��� sensitive ��͡�����Թ�ͧ����дѺ ����ӷ���ش
Non- registeredparameter Number
��� ��äǺ��� parameter ��ҧ��������Ẻ�ҵðҹ ��������ö��Ѻsynthesizer ��蹷���� ��������Ш� ������ա˹�觷ҧ���͡�������ö��᷹�к� System Exclusive data �� ��������Ѿ���������ѹ���ҧ�á��� NRPNs ��ǹ����ǹ�˭�����������ж١����Ѻ ����ͧ����բͧ Yamaha ��� Roland ����ѡ
Non-linear recording
��� �ѡɳС�÷ӧҹ�ͧ�к��Ѵ���§Ẻ�ԨԵ�ŷ�����������§�� �������١�Ѵ����ö play back ���ӡ�Ѻ���������� order �˹�����·������ժ�ͧ��ҧ���� gap ������� ����仨����ѡɳ��� linear ���ͧ�ҡ��ʴط��������ö play back ���� order ����Ѵ��� ��á��ҹ��
Normalise
��� socket �ѹ˹�觨ж����ҷӧҹ������ԡ�������Ͷ١�����ҡѺ���� ����ա���ѡ�� original signal path��餧��� �͡�Шҡ����ա�����º��������㹵�� socket ���
Nut
��� ���ʵԡ����� ���� ��ǹ��Сͺ������ѡɳ�������д١�ç head stock ���ǹ���� �ͧ�͡յ��� ��㹡�â֧��¡յ����ҹ fingerboard �������������Тͧ��������˹�� ��ҹ���ͧ fret
Nyquist theorem
��� ������к��������к� digital sampling system �к�˹�� �е�ͧ�� sample rate ���ҧ���� �ͧ��Ңͧ��������٧�ش�ͧ sample �����ѧ�١���ͺ����������ա����§����Դ aliasing ���ͧ�ҡ��ҵ�� anti-aliasing filter �������ö�ӧҹ�����ҧ����ó� �ѧ��鹤������ͧ sample �����㹡�÷��ͺ�»��Է���仨ж١������դ�Ҥ���������ҧ�������ͧ��Ңͧ ��������٧�ش���� maximum input
O
Octave
��� ������� �����дѺ���§˹�觶١����¹����٧��鹴��� octave ����������ж١ double �� �ͧ���
Off-line
��� ��кǹ��÷���Դ��������ҧ������§����Ѵ����ѧ���١��� ������ҧ�� ������к���ԡ�� ����������ҧ���ҧ���ͪ��·ӧҹẺ off-line ���ͧ�ҡ�����������Ƿ������������ �������������§�͵�͡�÷ӧҹ�຺ real time
Ohm
��� ˹��¢ͧ�ç��ҹ�����俿��
Omni
��� ����⿹����դ��� sensitive 㹷ء��ȷҧ �����դ��� sensitive ����к� MIDI ��� ������
Open circuit
��� ��µ�ͷ���Դ����ǧ��俿�ҷ���ͧ�ѹ�����Ţͧ������
open reel
��� A tape machine where the tape is wound on spools rather than sealed in a cassette
operating system
��� software ��鹰ҹ��������������������ö��Ŵ ���� run ��������� ��
opto electronic device
��� ���ػ�ó쪹Դ˹�觷����յ�Ǿ���������俿�ҵԴ������о���������еͺʹͧ�µç �Ѻ��������ͧ俫���դ�����ҡ���� �ҧ���駨��ա���� Photoresistor 㹡�äǺ��� element ��ҧ�� compressor ��觨����ѭ�ҳ side-chain signal �繵��Ŵ��������ʧ
oscillator
��� ǧ��俿�Ҷ١�͡Ẻ���������ҧ�����ѭ�ҳ俿��Ẻ��������ͧ
overdub
��� ������� task �ա˹�觵����ѧ����Ѵ���§Ẻ multitrack���������Ѻ����¹ task �����ҹ ����
overload
��� ��÷ӧҹ����Թ���Ҥ�������ö�ͧ�к���÷ӧҹ����硷�ԡ����Ѻ�� �����ҡ���ҷ��ǧ��俿�Ҩ��Ѻ��
P
pad
��� ǧ��俿��Ẻ��͵�ҹ����Ŵ�дѺ�ѭ�ҳ俿��
pan pot
��� ��äǺ�����÷ӧҹ�ͧ user 㹡����ҹ mixer ���������ѭ�ҳ��ѧ�ش pan pot level �ͧ �ѭ�ҳ���١��价ҧ������Т�Ңͧ stereo output
parallel
��� ����������͡ѹ�ͧǧ��俿�ҷ�����ҡ�����ͧǧ�â��� ���ͷ���� input �ͧ�����ѹ����� ��͡ѹ���件֧����������ͧ͢ output ����
parameter
��� ��ҵ�ҧ����ռŵ�͡�÷ӧҹ�ͧ�ػ�ó����Ъ�Դ
parametric eq
��� ����ͧ equaliser ����ջ����Ǻ����¡�ѹ����Ѻ frequency, bandwidth ��� cut/boost
passive
��� ǧ��俿�ҷ������� active element
patch
��� �ա�ӷ�������¡ program �����¡���§���١�����������˹�����§�������� synthesizer ��� ����ö�١���¡����������¼�ҹ��� command �ͧ����� ��� MIDI effects units ��� samplers ���� patch ��������蹡ѹ
patchbay
��� �к�˹�觢ͧ panel-mounted connector ���١������ input ��� output ��ѧ central point �ҡ������ѹ����ö�Թ�ҧ������ plug-in patch cord
patch cord
��� ������������������Ѻ patch bay
peak
��� �дѺ�٧�ش�ͧ�ѭ�ҳ˹���ѭ�ҳ
PFL
��� Pre-fade listen ���к�˹�觷�������ἧ mixing console ���������Ѻuser �������͡�ѧ���§ �ѭ�ҳ����ͧ��� ������ͧ�ӹ֧�֧���˹觢ͧ fader �����ѧ�Ǻ����ѭ�ҳ��������
phantom power
��� ��Ǩ���俢�Ҵ 48V DC ����Ѻ capacitor ����⿹ �������¼�ҹ�ҧ�ѭ�ҳ�ͧ ��� mic cable
phase
��� ��ǧ�ͧ�ѭ�ҳ����ҧ�ѹ�����ҧ�����ѭ�ҳ����硷�ԡ���ͧ���� ������¡������ҧ���� �ٻẺ�ͧͧ�� ��� 360 ͧ�����¶֧��ô�����ͧ˹�� cycle
phaser
��� Effect ����繵������ѭ�ҳ˹��� ��ҡѺ����ѹ�ͧ��ٻẺ phase-shifted ������� ���� ���ҧ filtering effect �� phaser ��ǹ�˭�ж١�Ǻ����¤�� LFO
phono plug
��� Hi-fi connector ���͵���������� Hi-fi �١�Ѳ���� RCA ��ж١�����ҧ������������ͧ ���
pickup
��� ��ǹ˹�觢ͧ�յ������˹�ҷ������¹�����蹢ͧ��� string ������ѭ�ҳ����硷�ԡ��
pitch bend
��ǤǺ��� message ���١�͡Ẻ�����ҧ����Ш�������㹡������¹ pitch ��������� ��õͺ
��� ���ʹͧ����ʹ���ͧ��Ѻ���������ǢͧPitch bend data ����ö������㹡���Ѵ���� ��䢵�ҧ� �������Ѻ������ MIDI �֧�������ѹ���������ǹ˹�觢ͧ Controller message- group ����
pitch shifter
��� �ػ�ó�����Ѻ�������¹ pitch �ͧ�ѭ�ҳ���§�·��������� duration �ͧ�ѹ����¹��� 仴���
poly mode
��� mode ˹�觢ͧ MIDI ���١��ҹ���ҧ������·���ش ���������ͧ���������ö�ͺʹͧ��� ��������Ƿ����ѧ�١�觼�ҹ single MIDI channel ����������ǡѹ
polyphony
��� ��������ö�ͧ����ͧ����ժ�Դ�������ö��������ҡ�����ͧ��Ǿ�����ѹ��������� ��� ����ͧ����շ��������з��� 1 �������ҹ�鹨ж١���¡��� monophonic
port
��� ���������������Ѻ input ���� output �ͧ data
portamento
��� gliding �Ϳ ��觪����������ö��������§ pitch �١����¹Ẻ���� ���ͤ���� fade ᷹��� ������¹Ẻ��зѹ�ѹ ��觨зӧҹ����͡��������� MIDI note �١�������
post-fade
��� �ѭ�ҳ Aux ��觨зӧҹ��ͨҡ channel fader �� aux �����ѭ�ҳ� �ѧ channel �� ��������ա������¹�ŧ�ͧ fader �������ǹ�˭�ж١����Ѻ�ػ�ó��Ϳ��
post production
��� ��鹧ҹ����Դ�ҡ����Ѵ�ʵٴ�����ѧ�ҡ��кǹ��� mixing ��������ó�����
power supply
��� �����ǹ˹�觫�觶١�͡Ẻ��������㹡������¹�����俿����ѡ������ç�ѹ俿������� ��ҵ�������繵�͡����ҹ�ͧǧ��俿�������ػ�ó��ҧ�
PPM
��� Peak programmed meter �����쪹Դ˹�觷���͡Ẻ�����͵�Ǩ�Ҥ���ѭ�ҳ peak �ҡ���ҷ�����Ѻ�ѭ�ҳ���Է����
PPQN
��� Pulsed per quarter note �դ�������Ǣ�ͧ�Ѻ�ѭ�ҳ MIDI Clock derived sync signals
PQ coding
��� ��кǹ���㹡����� pause, cue ��� subcode ������ѧ digital master tape ���ͷӡ�� ����������㹡�ü�Ե CD
pre-emphasis
��� �к�˹�觷�����û� hight frequency boost ��ѧ���§�˹�觡����зӡ�� process ����Ŵ���§ noise �͡�ҡ����ѧ��ͧ�ա�кǹ����ա���ҧ������¡��� de-emphasis process ��觨е�ͧ������ͷӡ�� playback ���͡���ѭ�ҳ original ��Ѻ��� �������Ŵ���§ noise ����դ�������٧����Ҩ�Դ���������ҧ����Ѵ���§
pre-fade
��� �ѭ�ҳ aux signal ���зӧҹ�� Channel fader ���ͷ�� Channel fader ��������ռ� ��з��Ѻ aux send level �»��Ԩж١��㹡�����ҧ fold back ���� cue mix
preset
��� Effect unit ���� Synth patch ����������ö����¹����������� user
pressure
��� ���ա��˹�觫���դ����������ǡѺ aftertouch
print through
��� ���˵ء�ó������������ҡ����Դ������ͧ�ҡ�С������Դ�ѭ������ǡѺ������������ ���͡���١�ѹ�֡���������� ��Шз��������Ŷ١�ѹ�֡��Ӻ� layer �Ѵ�� ��觨з�����Դ �ѭ�ҷ�����¡��� low level pre ���� post echoes
processor
��� �ػ�ó���١�͡Ẻ��������Ѻ�ѭ�ҳ���§�¡������¹ dynamic ���� frequency content ������ҧ�ͧ processor ��Դ��ҧ����� compressor, gate ��� equaliser
program change
��� ��ͤ��� MIDI ���� MIDI message �͡Ẻ������������¹ instrument ���� unit patch
pulse wave
��� square wave ������դ�����ҹ��������� (non-symmetrical) Pulse wave �դس���ѵ� �ͧ���§������������硡��� square wave ��觷�����ѹ�ջ���ª���ҡ㹡���ѧ������ ����ͧ����ժ�Դ������͢���� (reed instrument) ���§����Ҩҡ����ͧ����ժ�Դ��������¹��� mark/space ratio �ͧ �����ѭ�ҳ����
pulse wave modulation
��� ��û�Ѻ����¹�ͺ��÷ӧҹ (mark/space ratio) �ͧ puls wave ��觨з�����Դ��� ����¹�ŧ���§�ͧ basic tone���Ŵ���§ LFO �ͧ pulse width ����ö������㹡�� ��Դ���§�Ϳ pseudo-chorus effect ��
punch in
��� ��ù� track ���١�ѹ�֡��������㹵�� record ����ҷ��١��ͧ������ҧ playback ������� track �����ѧ�������١�������ҹ������Ͷ١᷹������ track �ѹ����
punch out
��� �����Ѻ (���������§) �͡�ҡ����Ѵ��ѧ�ҡ punch in �������� ��� ����ͧ��蹷�� ����ö multi task ����ǹ�˭� ��� punch in ���� punch out ����ö�����·������ͧ ��ش���
PZM
��� pressure zone microphone ��˹��㹪�Դ�ͧ boundary microphone �͡Ẻ������ �Ѵ���§ out-of-phase sound ���١�з���Ѻ�Ҩҡ��鹼����µ�ҧ����ͧ�Ѵ
Q
Q
��� ˹���㹡���Ѵ�س���ѵ����§�з��ͧ
filter
��觶�Ҥ��
Q
����ҡ�ʴ����
���§�з��� �ҡ
������Ф�������դ���᤺ �ҡ����
Quantise
��� ������µ���굷��١�Ѵ� MIDI sequencer �����������Ѻ user defined subdivision �ͧ musical bar ������ҧ �� 16s �ѧ���蹹���Ҩ�١�� 㹡����� timing error
R
RAM
���
Random Access Memory
��
memory
��Դ˹�觷������
�Ѻ����������
��˹�ҷ���繷�� �红����������������Ǥ���
��觢�����
����������������ͷӡ�ûԴ��Ե��
�����˵ع��
�ҹ���������繷��е�ͧ
૿����
disk
�������ͧ������������٭���
R-DAT
���
����ͧ����ԨԵ������Ѻ�к�
rotating head system
Real time
���
��û����ż�
audio
���������ӧҹ������ѭ�ҳ�ѧ����ǡ��ѧ�١�Ѵ
����
��蹫��
��á�� �ӷ��
�ç�ѹ�������¡���
off-line
��͡�û����ż��ѭ�ҳ
�зӡ������������ա����� ����
non – real time
Release
���
���ҷ��������Ѻ
level
�
level
˹������
���ҷ����㹡�á�Ѻ����дѺ����
�»��Ԩ��� �
���Ժ���÷��������§���١�ѧ��������
level
Ŵŧ��ѧ
�ҡ����¤���
Resistance
���
��ǵ�ҹ�����Ţͧ�����俿��
��˹�����
ohm
Resolution
���
����Ѵ���������´����ѭ�ҳ���͡����˹���١���ҧ�����к��ԨԵ��
(digitising system)
��������
bit
�ҡ�������з����
amplitude
�ͧ ����
sample
����ö�١�Ѵ�������´�ҡ��觢��
�������ǹ��Сͺ����ͧ
converter design
����ռš�з���ͤ��������㹡���Ѵ
High conversation accuracy
���� �֧
high resolution
Resonance
���
�س���ѵԢͧ��������������Ǣͧ�ѹ�ͧ����ö���͡�����������������
᤺��ҹ�� ��ҹ��
(
��
Q)
Reverb
��� acoustic ambience
�Դ�ҡ����з��ͧ���§��������§���ͧ�˹��
RF
���
��������Է��
����
Radio Frequency
RF interference
���
�ѭ�ҳú�ǹ����դ��
range
�٧���ҡ�����Թ�ͧ�������ҡ
Ribbon microphone
��� ����⿹��Դ˹�觷���ǨѺ�ѭ�ҳ���§���ѡɳФ�����Ժ����蹺ҧ�١�ǹ����� ʹ�����������������§������Ժ����Դ�����������С������Դ�����俿�����㹵�� �Ժ����ػ�ó좹Դ˹�觷�����Ѻ��� process �ѭ�ҳ input �ͧ�ѭ�ҳ������ѹ� Ẻ�����ѭ�ҳ output ����������ѭ�ҳ original �ͧ input ������㹵�Ǣͧ �ѹ���ѹ���ӡ���Ǻ�������������������¡ѹ������鹰ҹ�Ҩҡ��� sum ��Ф��� ᵡ��ҧ�����ҧ ͧ���Сͺ�ͧ�ѭ�ҳ������� input ��ҧ���÷ӧҹ�ͧ ring modulator ����դ����ѡ�ҡ����ش��͡�����ҧ���§���¹�� Dalek ��͡�ҡ��� �Ҩ��� ������ҧ texture �ͧ����ͧ���������դ����������ҡ�����駢������Ѻ��������ѹ��ͧ �ѭ�ҳ input ����������Ѿ�������Ҩ���͡����Ẻ musical �����Ҩ�������§ ���������ҹ�ѹ��������Դ����������ҧ�� ring modulation ����ö�����ҧ���§����� �ѡɳ�����ⷹ���§��д���� (����� ring �١�������������ǧ��俿�Ҵ��������١ ��㹡�����ҧ�Ϳ����ա���� ring of diodes)
RMS
��� Root mean square �Ըշ����㹡�ú觪���÷ӧҹ�ͧ�ػ�ó�����硷�ԡ����˹��� �������Ҿ�Ǵ��������鷴�ͺ sine wave ���ҧ������ͧ
Rolloff
���
�÷������Ѵ��ҿ���������˹������ѭ�ҳ��ŧ��ѧ�ҡ����ѭ�ҳ
������觼�ҹ
cut off point
�ͧ�����������
ROM
��� Read only memory
��
memory
��Դ��������
non – volatile
��èآ����� ����������ö����¹�ŧ�����
�к���Ժѵԡ����ǹ
�˭�кѹ�֡�����ŵ�ҧ� �
ROM
���ͧ�ҡ��һԴ��Ե���
memory
��ҧ�
������٭���
�����Դ�����������
S
Safety copy
���
��÷ӫ��
���ͤѴ�͡
�����蹴�ʡ�
original
����Ѻ��ҹ㹡óշ����
original
�Դ���������������٭���
Sample
���
��鹵��÷ӧҹ����
A/D converter
�����
amplitude
�ͧ�ѭ�ҳ����Դ
���ҧ������ͧ�١�Ѵ����������駵�ҷ�
(44.1kHz
㹡óշ����
CD)
Sample and hold
��� �»��Ԩ����¶֧ feature ���˹�觷���Դ���������� values ������� �繪�ǧ� �����ѧ �ҡ��鹨ж١�����ͤǺ����ѧ�������� �� pitch ���ͤ������ͧ������� �͡�ҡ��� Sample ��� hold circuit �ѧ�١��ҹ���Ѻ����ͧ�ѧ���������§���͡������ ������� ����鵷��١�����ѧ�ҡ����¤�������
Sample rate
��� ����Ţ�ͧ��ǧ����ҵ�ҧ��� A/D converter �ӡ�� sample �����ѭ�ҳ������Ѻ����Թҷ�
Sawtooth wave
��� �١���¡��������ͨҡ���ѡɳФ���������� ��觤����ѭ�ҳ��ǹ��к�è������§����դ��� ������ѹ��ҹ��
SCSI
��� �� interface �ͧ�к����������좹Ҵ��� ����Ѻ Hard drive ����ͧ�ʡ� CD- ROM drive ����ػ�ó���蹷���������Ѻ���������� �ػ�ó�SCSI �����ѹ�� ID number �繢ͧ����ͧ ����������ö���Ţ��ӡѹ�ͧ�ѹ�����ҡ�ػ�ó� SCSI ����� chain ���ǡѹ����ػ�ó� SCSI ����ش���¢ͧ chain ����е�ͧ�١�ЧѺ�� �¡���� internal terminator ������١�Ѵ������Ҿ�����Ѻ����ػ�ó��������� ����������͡Ѻ plug- in terminator �������ö�����ʹաѺ SCSI socket
Sequencer
��� �ػ�ó�����㹡�úѹ�֡�����蹫�Ӣ����� MIDI �»��Ԩ�������ٻẺ�ͧ multitrack format �������ö�����ͧ���Сͺ����դ����Ѻ���١���ҧ�����˹�� part ���˹�觤���
Short circuit
��� �ҧ�Թ�ͧ�ѭ�ҳ����դ�����ҹ�ҹ��ӷ������������俿����ż�ҹ���觤ӹ���� ���Ԩ�������·ҧ�Թ�����俷���Դ��鹨ҡ����мԴ����
Sibilance
��� ���§ whistling ���� lisping ����դ�������٧����ռš�з���͡���Ѵ���§��ͧ����Դ��� ���ͧ�ҡ����� mic technique ������������ equalisation ����ҡ�Թ� �����ѡɳТͧ ���§��ͧ���������ʹѧ���һ���
Side-chain
��� ��ǹ˹�觢ͧǧ��俿�ҷ���¡��ǹ�ͧ�ѭ�ҳ��ѡ������ process 㹷ҧ㴷ҧ˹�� ��� Compressor ����仨����ѭ�ҳ side-chain ��������Ѻ�ѭ�ҳ�����㹡�äǺ��� Compressor
Signal
��� �����俿�ҫ�����繵��᷹�ͧ output ������ҧ�� ���§
Signal chain
��� ���зҧ��������ѭ�ҳ��ѭ�ҹ˹�觨ҡ input ��ѧ system �����ѧoutput
Signal-to-noise ratio
��� �ѵ����ǹ�ͧ�дѺ�ѭ�ҳ�٧�ش������§ noise ������������ �١���¡������ dBs
Sine wave
��� �ٻẺ���蹢ͧ pure tone �������� harmonic
Single-ended noise
��� �ػ�ó쪹Դ˹��������Ѻź����Ŵͧ���Сͺ�ͧ���§ noise �������繵�ͧ���� ������������Ѻ㹡óշ���� Dolby ���� dbx
Slave
��� �ػ�ó�������������äǺ����ͧ�ػ�ó� master
SMPTE
��� Time code �١�Ѳ����������Ѻ�ص��ˡ����Ҿ¹�� ��㹻Ѩ�غѹ�١��ѹ���ҧ��� �����ǧ��ô������С���Ѵ���§ SMTE ��� real-time code �������Ǣͧ�Ѻ���� �� ������� �ҷ� ����Թҷ� ����֧����� �����մ���������� �ҡ���ҷ�����Ѻ musical tempo
โค้ดศัพท์ลับแม่ค้าออนไลน์สายย่อ CF, F, CC, CF NO CC หมายความว่ายังไง กดกริ่งรัว ๆ
เก็บตกภาษาอังกฤษ วันนี้ขอเสนอโค้ดศัพท์ลับแม่ค้าออนไลน์สายย่อ CF, F, CC, CF NO CC หมายความว่ายังไง
อย่าลืมกดไลค์ กดติดตาม (Subscribe) กดกระดิ่งเป็นกำลังใจให้ผมด้วยเด้อ 🤟🏻
สามารถติดตามผมได้ที่ ❣️
👉🏻 FB ส่วนตัว : https://bit.ly/2Wp2gp9
นอกจากการดูบทความนี้แล้ว คุณยังสามารถดูข้อมูลที่เป็นประโยชน์อื่นๆ อีกมากมายที่เราให้ไว้ที่นี่: ดูความรู้เพิ่มเติมที่นี่

(Thai version) Frequency shift keying FSK

LORA INTRO เทคโนโลยีสื่อสารทางไกลใช้พลังงานต่ำ LoRa
รู้จัก LoRa ที่เป็นเทคโนโลยีสื่อสารทางไกลใช้พลังงานต่ำ เปรียบเทียบ LoRa ข้อดี ข้อเสียกับเทคโนโลยีอื่นๆ เข้าใจการรับส่งข้อมูล เครือข่ายการทำงาน ความถี่ใช้งาน ข้อกำหนดต่างๆ และมาตรฐานของ LoRa

HO 018 / FSK 158 | ÖHLINS ตรงรุ่น Forza 350 พร้อมวิธีตั้งค่าเองเบื้องต้น
ด้านหลังเป็น HO 018 ส่วนด้านหน้าเป็น FSK 158
เป็นโช๊คตรงรุ่น Forza 350
เนื้อหานี้ เป็นการตั้งค่าเองเบื้องต้นตามคู่มือ
อาจจะไม่ละเอียดครบถ้วนเท่าผู้เชี่ยวชาญปรับตั้งให้นะครับ หากผิดพลาดประการใด ต้องขออภัยไว้ ณ ที่นี้ครับ

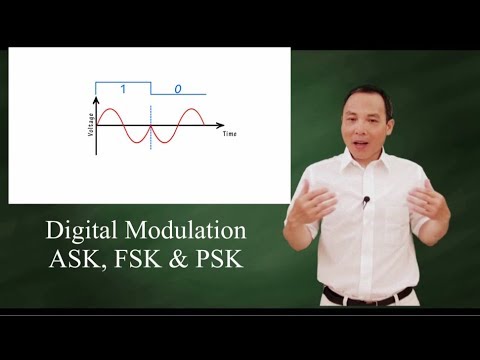
Digital modulation: ASK, FSK, and PSK
Last time, we talked about two analog modulation methods: AM and FM.
Today we will talk about three types of digital modulation: Amplitude Shift Keying (ASK), Frequency Shift Keying (FSK), and Phase Shift Keying (PSK).
My topics are organized by playlists:
https://www.youtube.com/user/sunnylearning/playlists
My most popular videos:
https://www.youtube.com/user/sunnylearning/videos?sort=p\u0026view=0\u0026flow=grid
Wireless and WiFi
https://www.youtube.com/watch?v=PcbTMSf0D2M\u0026list=PLSNNzog5eydvJG48PYnWnNY7tQIfxTRb
Remote Access/WAN technologies
https://www.youtube.com/watch?v=B1tElYnFqL8\u0026list=PLSNNzog5eyduTVeiVQRV_AM35YKSrFgzr
This is my education channel. My topics cover networking, security, programming, data structure, algorithm, programming and other computerrelated materials.
Please leave comments, questions and subscribe!
Thank you very much!
Sunny Classroom
นอกจากการดูบทความนี้แล้ว คุณยังสามารถดูข้อมูลที่เป็นประโยชน์อื่นๆ อีกมากมายที่เราให้ไว้ที่นี่: ดูวิธีอื่นๆWiki
ขอบคุณมากสำหรับการดูหัวข้อโพสต์ fsk คือ